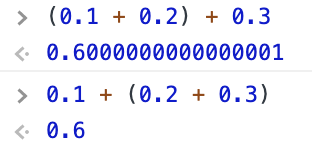
Reminder: addition of floating point numbers is NOT associative… (0.1 + 0.2) + 0.3 ≠ 0.1 + (0.2 + 0.3) …and this is true in basically _any_ language that uses floating point numbers. Here it is in javascript in the browser console:
Some things you find on GitHub are more interesting and frightening than others.
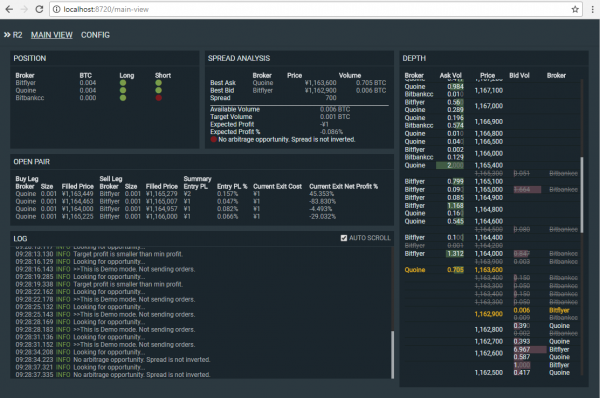
This one is both and some more. What is it you ask?
R2 Bitcoin Arbitrager is an automatic arbitrage trading application targeting Bitcoin exchanges.
So it’s buying and selling Bitcoins. And it’s doing this on different markets. On the topic of arbitrage Wikipedia has something to say:
In economics and finance, arbitrage is the practice of taking advantage of a price difference between two or more markets: striking a combination of matching deals that capitalize upon the imbalance, the profit being the difference between the market prices at which the unit is traded.
For example, an arbitrage opportunity is present when there is the opportunity to instantaneously buy something for a low price and sell it for a higher price.
Now this already is the second version of the tool and already 2 years old. See it as some sort of interesting archeological specimem. Please refrain to actually so something harmful with it.
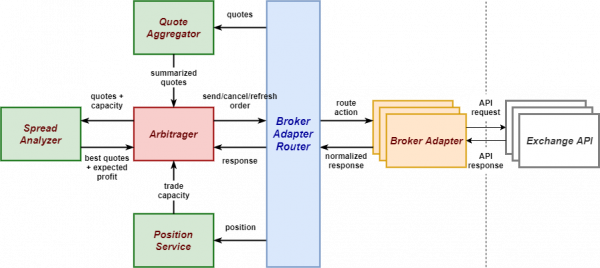
I am writing this down here because apart from it’s obvious horrors this is a good starting point to understand how these computer-trading-systems do work in principle.
Given that an architectural drawing is also included it gives all sorts of starting points to thoughts.
Also. What could possibly go wrong if a tool to buy/sell on actual markets with actual bitcoins is confident enough to include the “maxTargetProfit” configuration option. Effectively setting the top-line of profit you’re going to make!!!111
As you might know by now I am re-implementing MyFitnessPal functionality into my own application to be deeper integrated with kitchen hardware and my own personal use-cases rather than to be an add infested subscription based 3rd party applilcation.
So the development of this is ongoing, but I wanted to note down some progress and explanation.
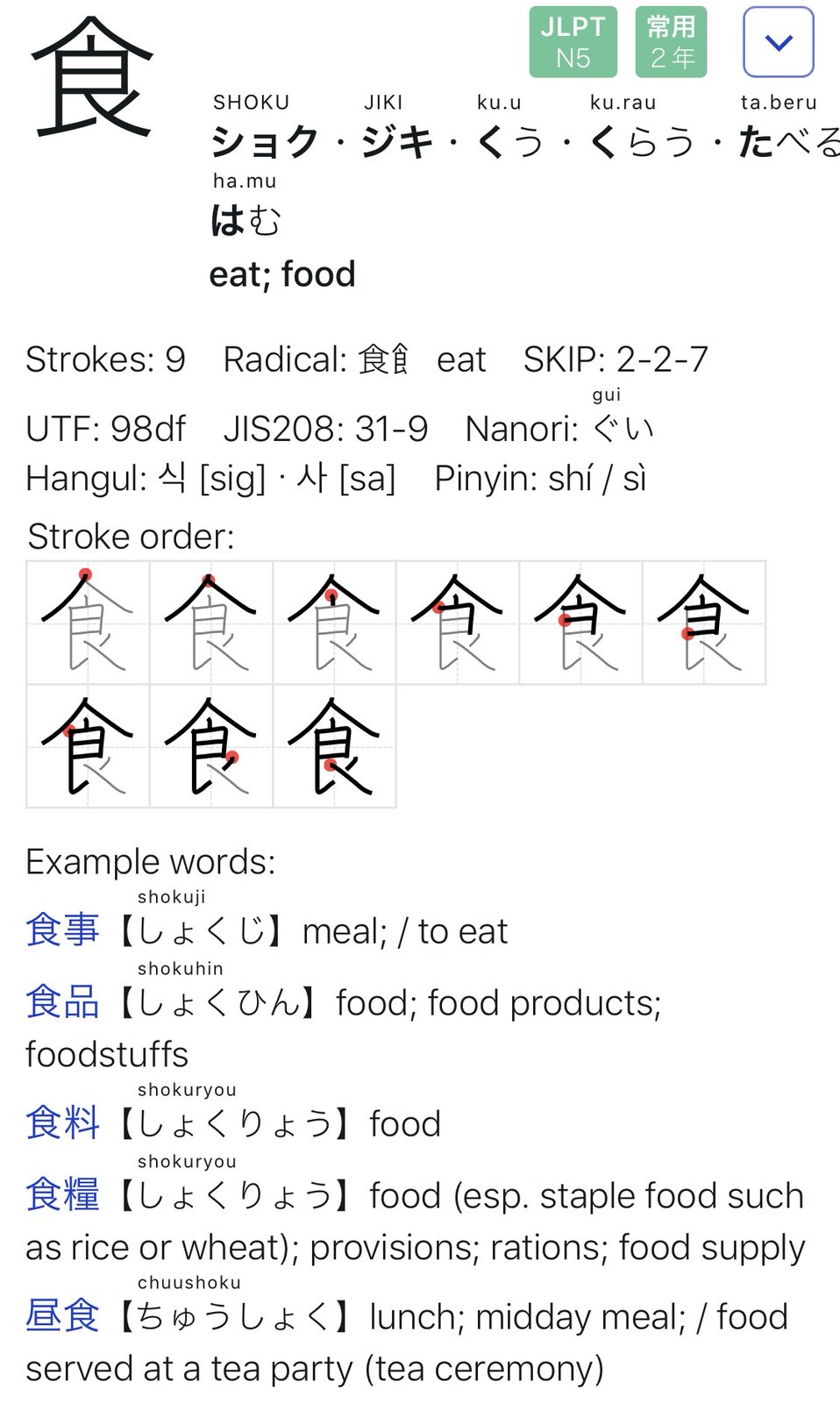
Let’s start with explaining the name: Tabemono.
It does really mean something – and as some might have guessed – in japanese:
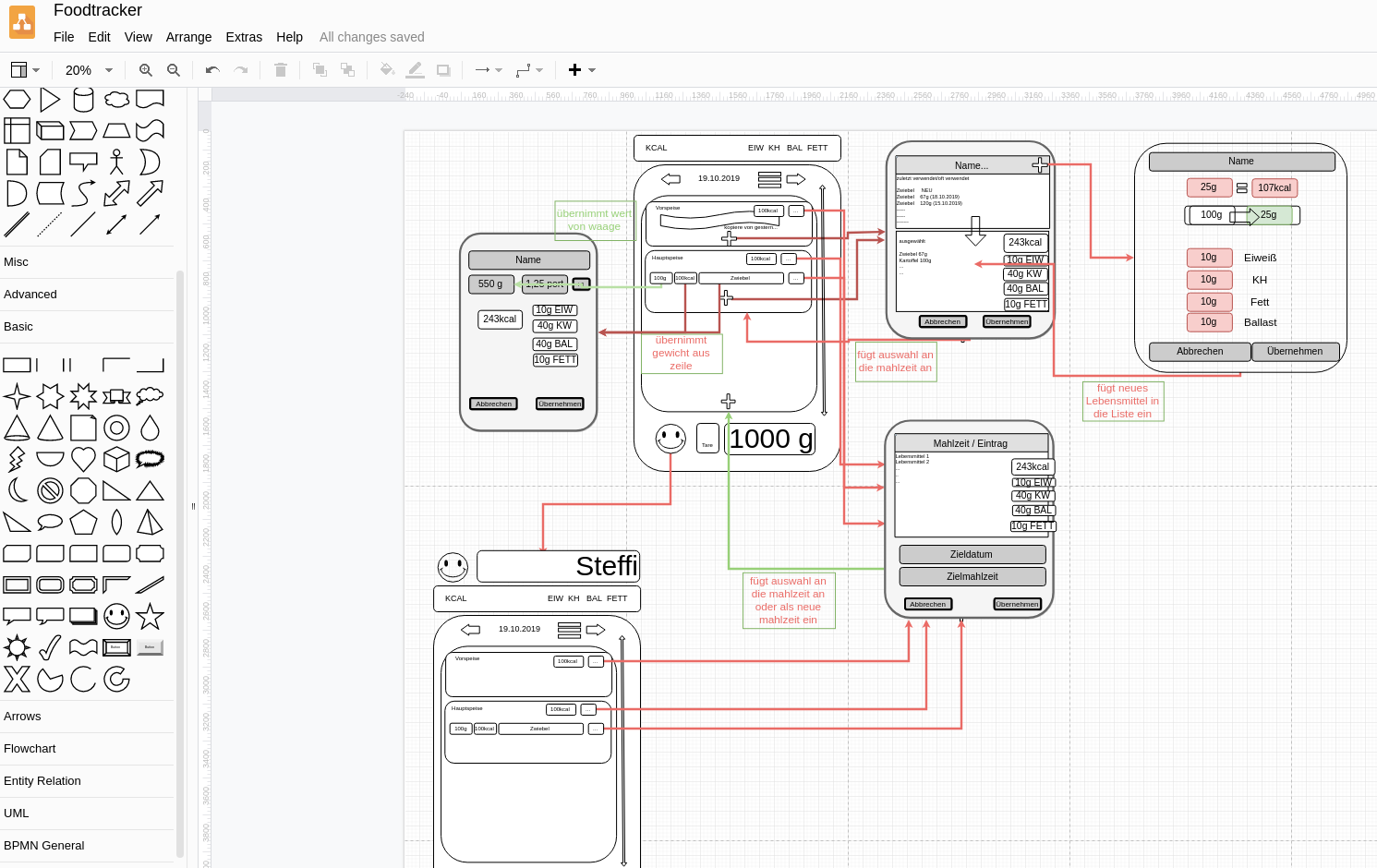
Implementing the UI from the UX has proven to be as challenging as expected.
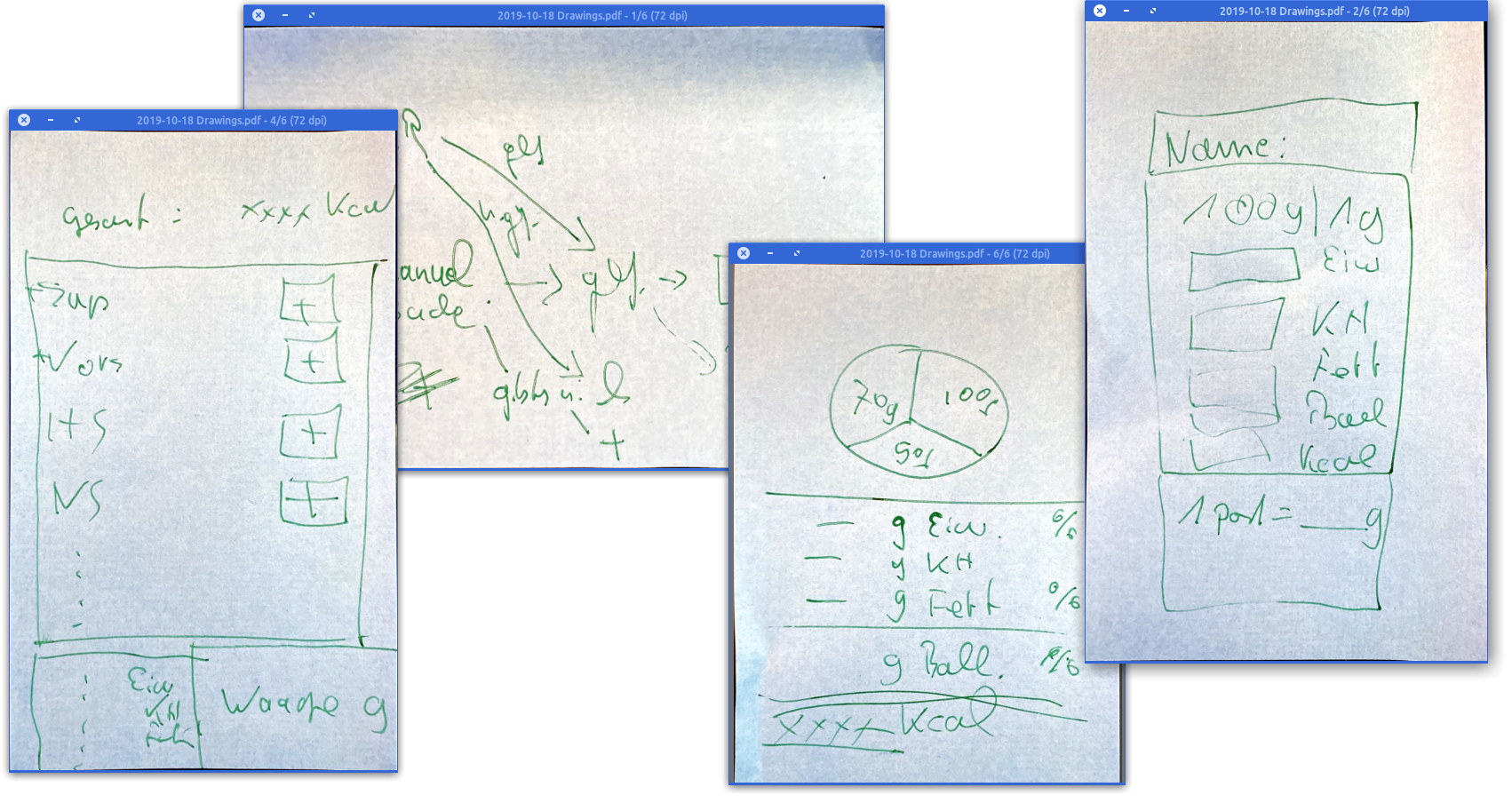
When we started to toss around the idea of re-implementing our food-tracking-needs we started with a simple scribble on post-it notes.
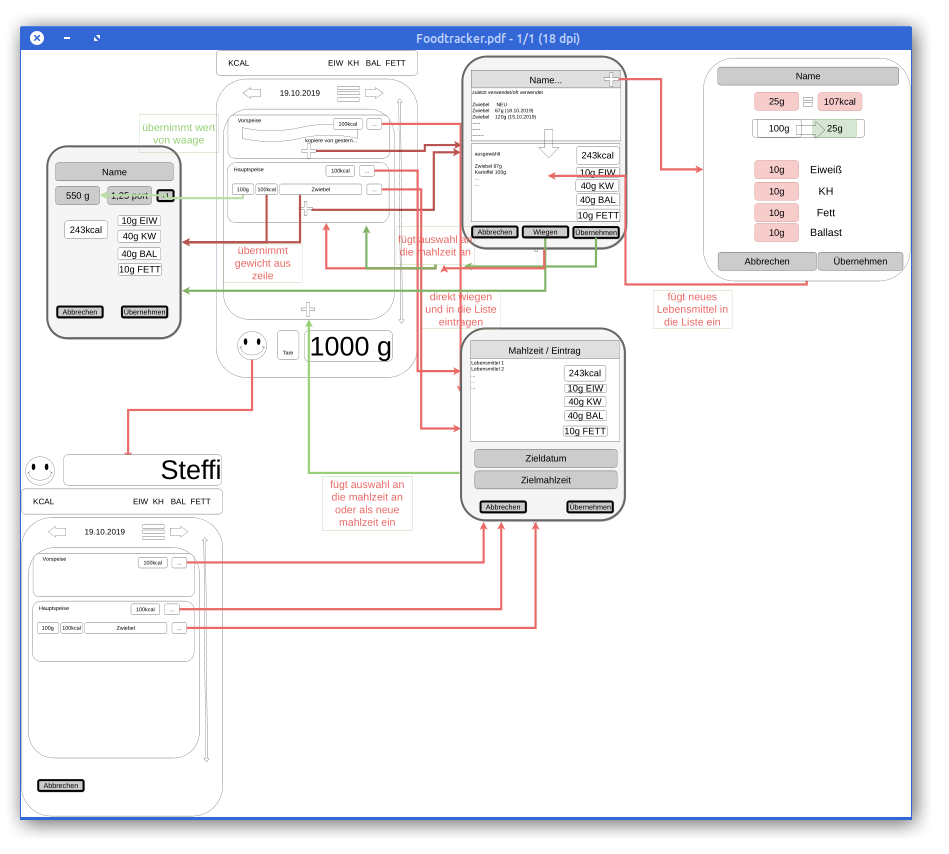
This quickly led to a digital version of this to better reflect what we wanted to happen during the different steps of use…
It wasn’t nice but it did act as an reminder of what we wanted to achieve.
The first thing we learned here was that this will all evolve while we are working on it.
So during a long international flight I’ve spent the better part of 11 hours on getting the above drawing into something resembling an iOS user interface mock-up. With the help of the (free for 1 private project) Adobe XD I clicked along and after 10 hours, this was the video I did of the click-dummy:
Since then I’ve spend maybe 1 more day and started the SwiftUI based implementation of the actual iOS application.
And this brought the first revelation: There are so many ideas that might make sense on paper and in a click-dummy. But only because those are just tools and not reality. It’s absolutely crucial to really DO the things rather than imagine them.
And so the second revelation came: If I had an advise to any product manager or developer out there: Go on and pick a project and try to go full-circle.
You ain’t full stack if you’re missing out on the understanding of the work and skill that your team members have and need.
There is a free and well integrated OpenVPN client for iOS devices already. And as much as this one works quite well it’s also lacking some comfort features that are now made available through alternative iOS client implementations of OpenVPN.
OpenVPN is an open-source commercial software that implements virtual private network techniques to create secure point-to-point or site-to-site connections in routed or bridged configurations and remote access facilities. It uses a custom security protocol that utilizes SSL/TLS for key exchange.
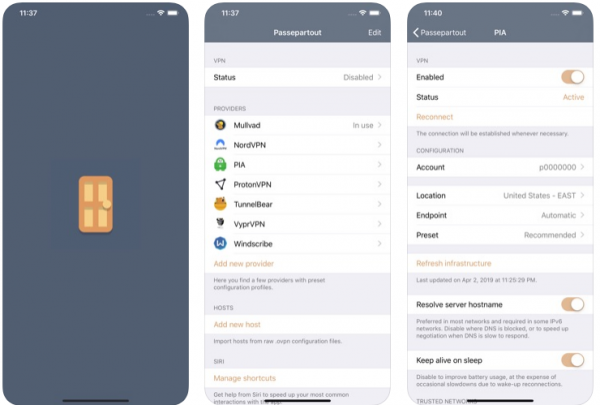
Meet Passepartout. The iOS OpenVPN client that comes with lots of comfort features. Of main interest for me is that Passepartout is aware of the connection you’re currently using and can adopt it’s VPN tunnel status accordingly.
Passepartout is a smart OpenVPN client perfectly integrated with the iOS platform. Passepartout is the only app you need for both well-known OpenVPN providers and your personal OpenVPN servers.
The goal of this book is to document commonly-known and lesser-known methods of doing various tasks using only built-in bash features. Using the snippets from this bible can help remove unneeded dependencies from scripts and in most cases make them faster. I came across these tips and discovered a few while developing neofetch, pxltrm and other smaller projects.
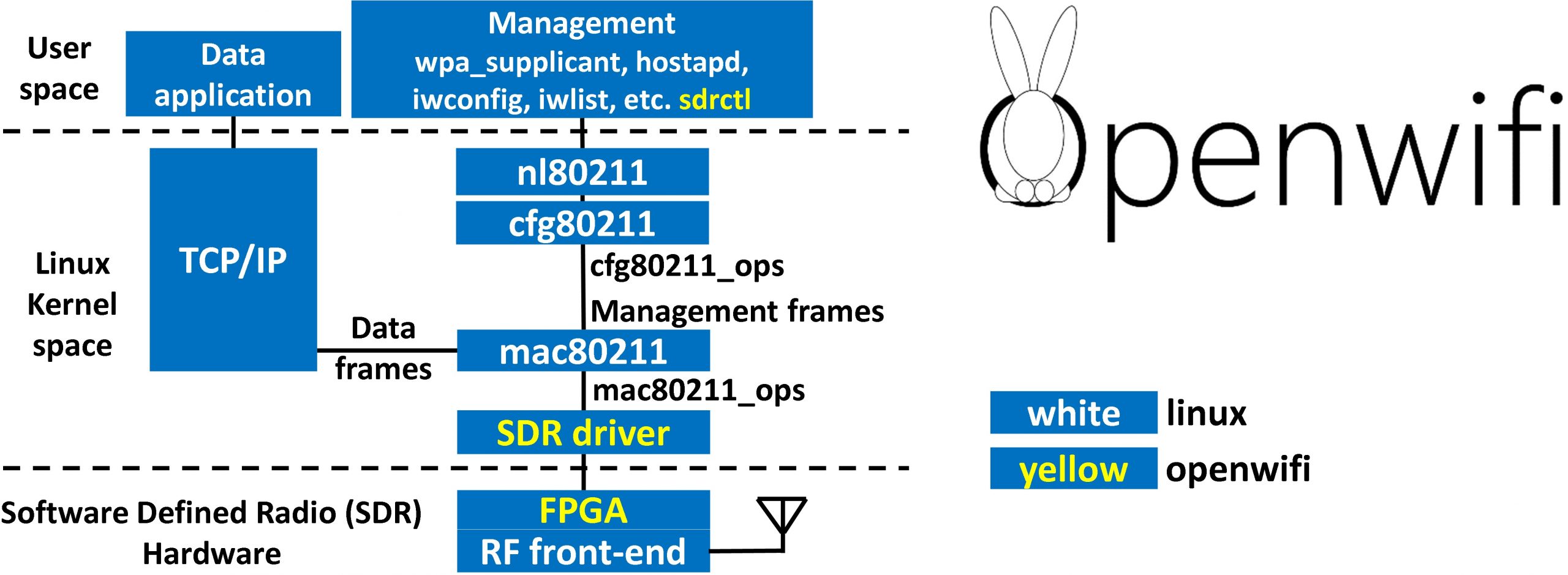
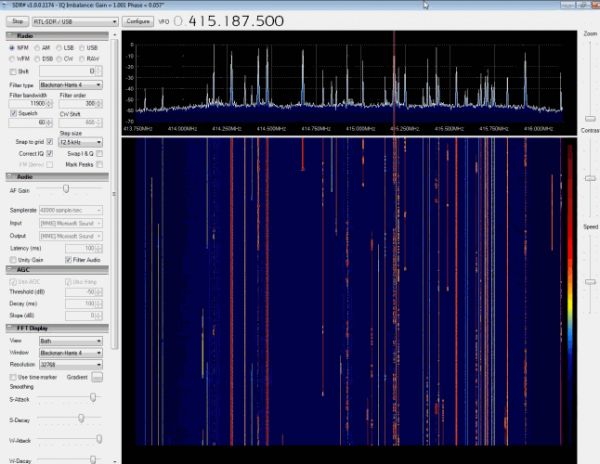
RTL-SDR is a very cheap ~$25 USB dongle that can be used as a computer based radio scanner for receiving live radio signals in your area (no internet required). Depending on the particular model it could receive frequencies from 500 kHz up to 1.75 GHz. Most software for the RTL-SDR is also community developed, and provided free of charge.
The origins of RTL-SDR stem from mass produced DVB-T TV tuner dongles that were based on the RTL2832U chipset. With the combined efforts of Antti Palosaari, Eric Fry and Osmocom (in particular Steve Markgraf) it was found that the raw I/Q data on the RTL2832U chipset could be accessed directly, which allowed the DVB-T TV tuner to be converted into a wideband software defined radio via a custom software driver developed by Steve Markgraf. If you’ve ever enjoyed the RTL-SDR project please consider donating to Osmocom via Open Collective as they are the ones who developed the drivers and brought RTL-SDR to life.
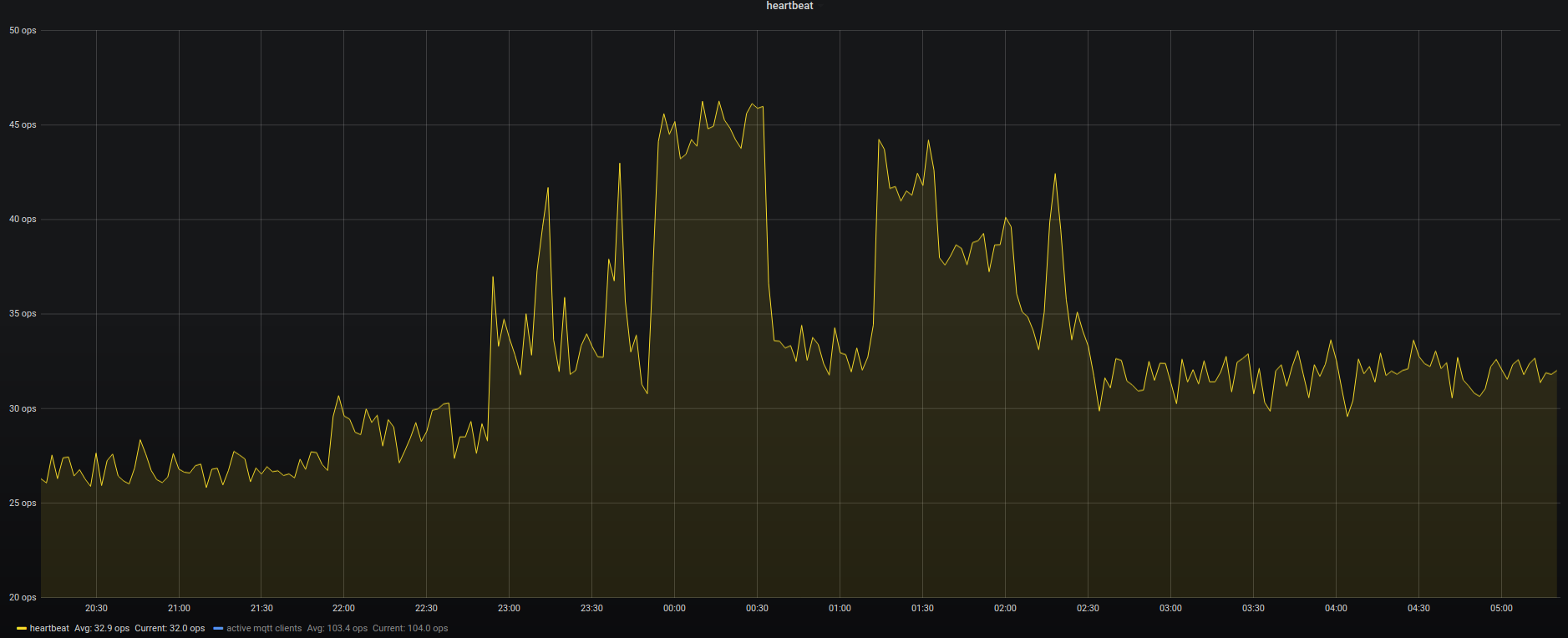
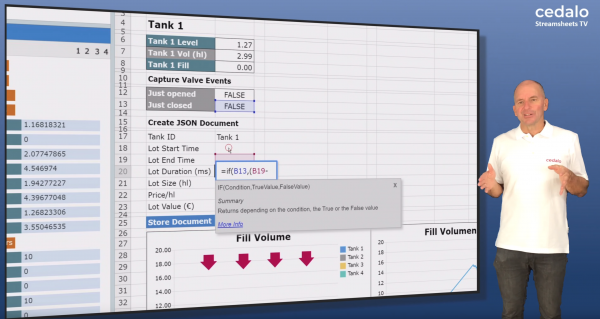
Streamsheets is, similar to NodeRed, a tool to step in between MQTT data coming in and something being done with it. Just other than NodeRed it is not based on flows but on a spreadsheet that executes in it’s entirety everytime a step is made.
Streamsheets are a new spreadsheet technology specifically designed for real-time data stream processing and the opportunities of digitization and the Industrial IoT.
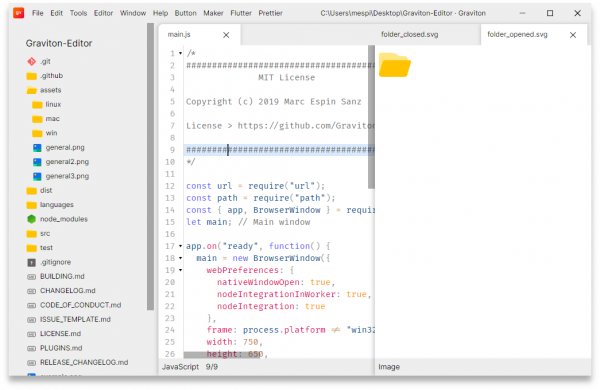
SwiftUI is the new cool kid on the block when it comes to iOS/iPadOS/macOS application development.
As Apple announced SwiftUI early 2019 it’s naturally only focussing on making all the declarative UI goodness available for the Apple operating systems. No non-apple platforms in focus. Naturally.
But there are ways. With the declarative way of creating user interfaces one apparently can simply start to re-implement the UI controls and have them render as HTML / Javascript…
Unlike some other efforts this doesn’t just render SwiftUI Views as HTML. It also sets up a connection between the browser and the code hosted in the Swift server, allowing for interaction – buttons, pickers, steppers, lists, navigation, you get it all!
In other words: SwiftWebUI is an implementation of (many but not all parts of) the SwiftUI API for the browser.
To repeat the Disclaimer: This is a toy project! Do not use for production. Use it to learn more about SwiftUI and its inner workings.
As RISC-V progressively challenges the existing ARM processor ecosystem it’s interesting to see more and more software projects popping up that aim that RISC-V architecture.
Here’s one project that aims to develop (and explain along the way) how to create an operating system from scratch. On top of the RISC-V specifics this tutorial also aims to teach how this all can be done in a programming language called Rust.
Keep in mind that all of this is done on a baremetal system. No other software is running.
RISC-V (“risk five”) and the Rust programming language both start with an R, so naturally they fit together. In this blog, we will write an operating system targeting the RISC-V architecture in Rust (mostly). If you have a sane development environment for RISC-V, you can skip the setup parts right to bootloading. Otherwise, it’ll be fairly difficult to get started.
This tutorial will progressively build an operating system from start to something that you can show your friends or parents — if they’re significantly young enough. Since I’m rather new at this I decided to make it a “feature” that each blog post will mature as time goes on. More details will be added and some will be clarified. I look forward to hearing from you!
I am back again and developing some smaller APIs for my own use.
As I am learning a new programming language and framework (SwiftUI) and for my little learning project I need to also implement a server backend. Implementing a RESTful service is quite straight-forward but for testing and UI prototyping I actually want to do some testing before really setting up the server side.
To easily test RESTful calls without actually implementing anything I found that Reqres is a quite useful tool to have in the toolbelt:
Apart from some pre-set-up API endpoints with dummy data (like users, …) it also features a request mirror service.
With that you can simply throw a JSON document into the general direction of Reqres and it will put a timestamp on it and return it right away.
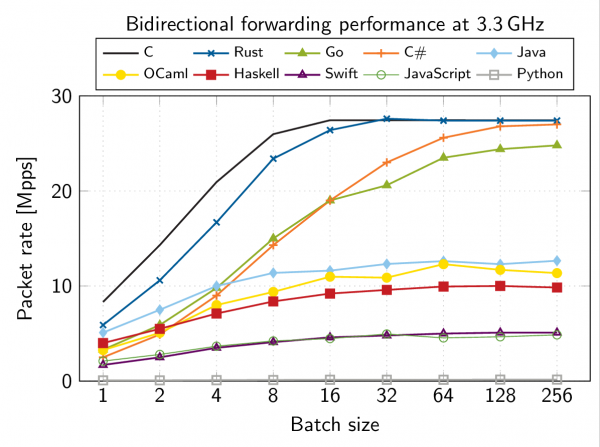
User space network drivers on Linux are often used in production environments to improve the performance of network-heavy applications. However, their inner workings are not clear to most programmers who use them. ixy aims to change this by providing a small educational user space network driver, which is gives a good overview of how these drivers work, using only 1000 lines of C code. While the language C is a good common denominator, which many developers are familiar with, its syntax is often much more dicult to read than that of more modern languages and makes the driver seem more complex than it actually is.
For this thesis I created a C# version of ixy, named ixy.cs, which utilizes the more modern syntax and additional safety of the C# programming language in order to make user space network driver development even more accessible. The viability of C# for driver programming will be analyzed and its advantages and disadvantages will be discussed.
The actual implementation (with other programming languages as well) can be found here.
Since I am back at developing the Head-Up-Display app I was writing about in February (yeah, mornings got darker again!) I want to leave this nice looking Odometer Javascript library here:
Odometer is a Javascript and CSS library for smoothly transitioning numbers. See the demo page for some examples.
Odometer’s animations are handled entirely in CSS using transforms making them extremely performant, with automatic fallback on older browsers.
Today I learned that the Apple iPhone re-purposes the IMAP protocol to implement the voice mail feature.
By sniffing the network traffic it was possible to examine the IMAP protocol revealing username and the corresponding hashed password (which allows to repeat a successful login) and of course all voicemail files. We want to highlight, that all the voicemail files have been transferred unencrypted.
Well, it’s about time to do something about MyFitnessPal. In our family we’re using their service by the daily. But just for logging. No reports, no further features used.
But still, we were using it for quite a time now:
almost 5 years logged every-single-day.
The service has started to roll out ads for some time now in their apps. There are only iOS / Android apps available. And a mediocre website.
Just recently they started to announce that their freeservice will restrict how many years back are going to be stored. From those 5 years we will loose 3.
In addition the whole integration has never gotten to a point where I would have decided to upgrade to the paid premium version. No functionality ever got added. No interfacing with scales, no optimizations for UI/UX, …
But they now reduce the functionalities and service and want me to cough up a bit of money:
I am not generally against subscriptions. But I am not getting 9,99 Euro of value out of the service. A shared google sheet would almost achieve parity. And the price itself is just not value based. For 2 Euro I probably would not feel the urge to move on. For 9,99 (times 2 for 2 accounts) make me move.
So I’ve sat down with my wife and we scribbled up some things we want to have in a replacement. The content and feature-set is agreed. Now I’ll throw up a prototype app.
It’ll be integrated with the MQTT scales. And with the flow we came up with we hopefully will reduce the interactions dramatically over MyFitnessPal. And it’ll never stop saving history. And I’ll learn something new.
Munzee is the next generation in global scavenger hunt games.
Track down QR Codes hidden in the real world and capture them for points. Whether you are a casual player, an avid explorer, or a hardcore competition enthusiast, Munzee helps you rediscover the world around you.
If you’re old enough to have used MS-DOS you know the benefits a read cache introduced back at the time for floppy disks. Without such a cache everything data intensive was magnitudes slower.
Now after all these years more and more stories emerge about how certain thresholds and timeings where set back in the days.
This is such a story:
Mark Zbikowski led the MS-DOS 2.0 project, and he sat down with a stopwatch while Aaron Reynolds and Chris Peters tried to swap floppy disks on an IBM PC as fast as they could.
They couldn’t do it under two seconds.
So the MS-DOS cache validity was set to two seconds. If two disk accesses occurred within two seconds of each other, the second one would assume that the cached values were still good.
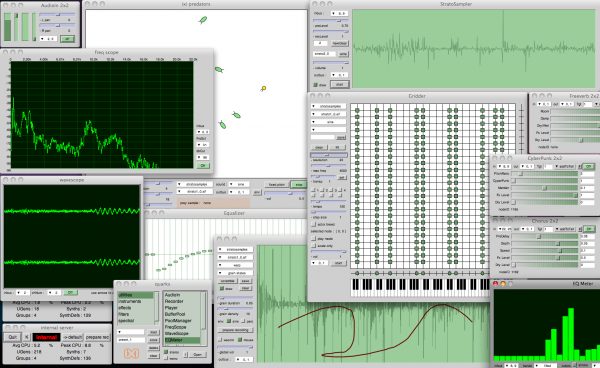
SuperCollider is a platform for audio synthesis and algorithmic composition, used by musicians, artists, and researchers working with sound. It is free and open source software available for Windows, macOS, and Linux.
SuperCollider features three major components:
scsynth, a real-time audio server, forms the core of the platform. It features 400+ unit generators (“UGens”) for analysis, synthesis, and processing.
sclang, an interpreted programming language. It is focused on sound, but not limited to any specific domain. sclang controls scsynth via Open Sound Control.
scide is an editor for sclang with an integrated help system.
If you, like me, are looking into new emerging tools and technologies you might also look at Wireguard.
WireGuard® is an extremely simple yet fast and modern VPN that utilizes state-of-the-art cryptography. It aims to be faster, simpler, leaner, and more useful than IPsec, while avoiding the massive headache. It intends to be considerably more performant than OpenVPN. WireGuard is designed as a general purpose VPN for running on embedded interfaces and super computers alike, fit for many different circumstances. Initially released for the Linux kernel, it is now cross-platform (Windows, macOS, BSD, iOS, Android) and widely deployable. It is currently under heavy development, but already it might be regarded as the most secure, easiest to use, and simplest VPN solution in the industry.
This guide will walk you through how to setup WireGuard in a way that all your client outgoing traffic will be routed via another machine (server). This is ideal for situations where you don’t trust the local network (public or coffee shop wifi) and wish to encrypt all your traffic to a server you trust, before routing it to the Internet.
If you, like me, once every while need to type the same again and again it might also get tired for you as it got for me.
A specific example: I very frequently need to have the current date available to be entered.
May it be because I need to name a file correctly, prepending it with the current date, or because I need it to refer to a specific date in a text I am currently typing.
The common scheme for dates I am using is YYYY-MM-DD. The 24th of September 2019 becomes 2019-09-24.
click to download
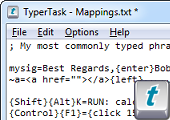
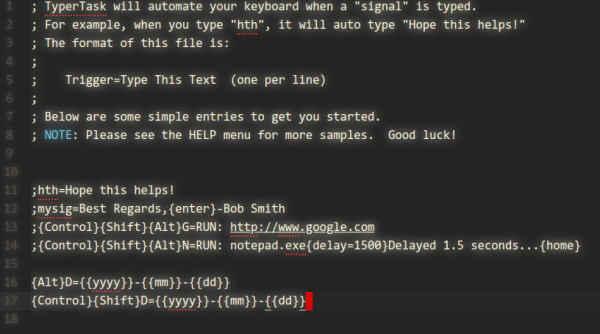
For when I am on Windows I am using a small utility called “TyperTask” to have a system wide shortcut available to me that will enter the current date with the press of a button.
As you can see in the screenshot above. By simply adding / editing the TXT file you will be able to specify new shortcuts. In the above case ALT+D or STRG+SHIFT+D will generated my desired date text pattern.
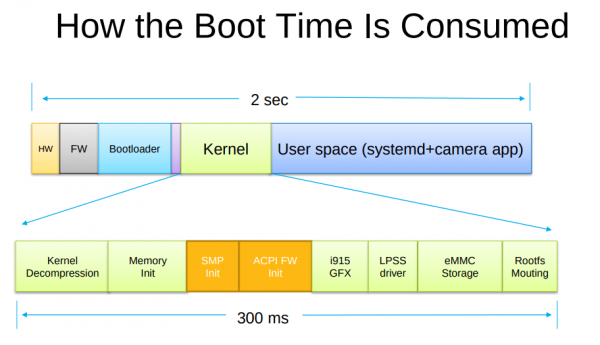
Booting a computer does not happen extremely often in most use-cases, yet it’s a field that has not seen as much optimization and development as others had.
We’ve got several quite big fish tanks in our house. Mainly used by freshwater turtles.
say Hi! to Wilma.
These turtles need to be fed every once in a while. And while this is not an issue normally it’s an issue if you leave the house for travel for an extended period of time.
Of course there are humans checking on everything in the house regularly but as much as can be automated should and will be automated in our household. So the requirement wa to have the turtle feeding automated.
To achieve this is would be necessary to have a fixed amount of turtle food be dispensed into the tanks on a plan and with some checks in the background (like water quality and such).
It’s been quite a hassle to come up with a plan how the hardware should look like and work. And ultimately i’ve settled on retrofitting an off-the-shelf fish pond feeder to become controllable through MQTT.
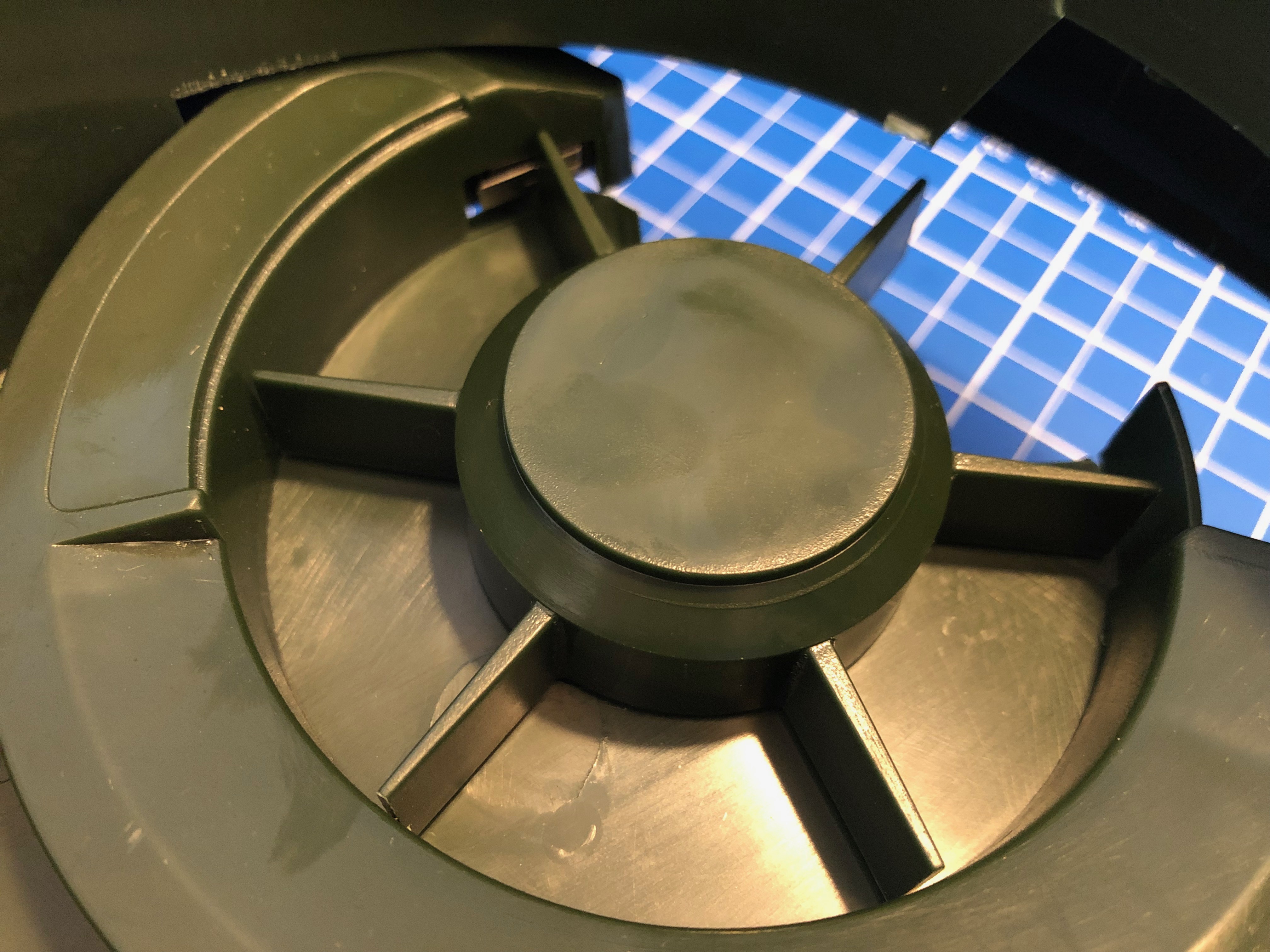
The pond feeder I’ve found and used is this one:
It’s not really worth linking to a specific product detail page as this sort of feeder is available under hundreds of different names. It always looks the same and is priced right around the same.
If you want to build this yourself, you want one that looks like the above. I’ve bought 3 of them and they all seem to come out of the same factory somewhere in China.
Anyway. If you got one you can easily open it up and start modifying it.
Hardware
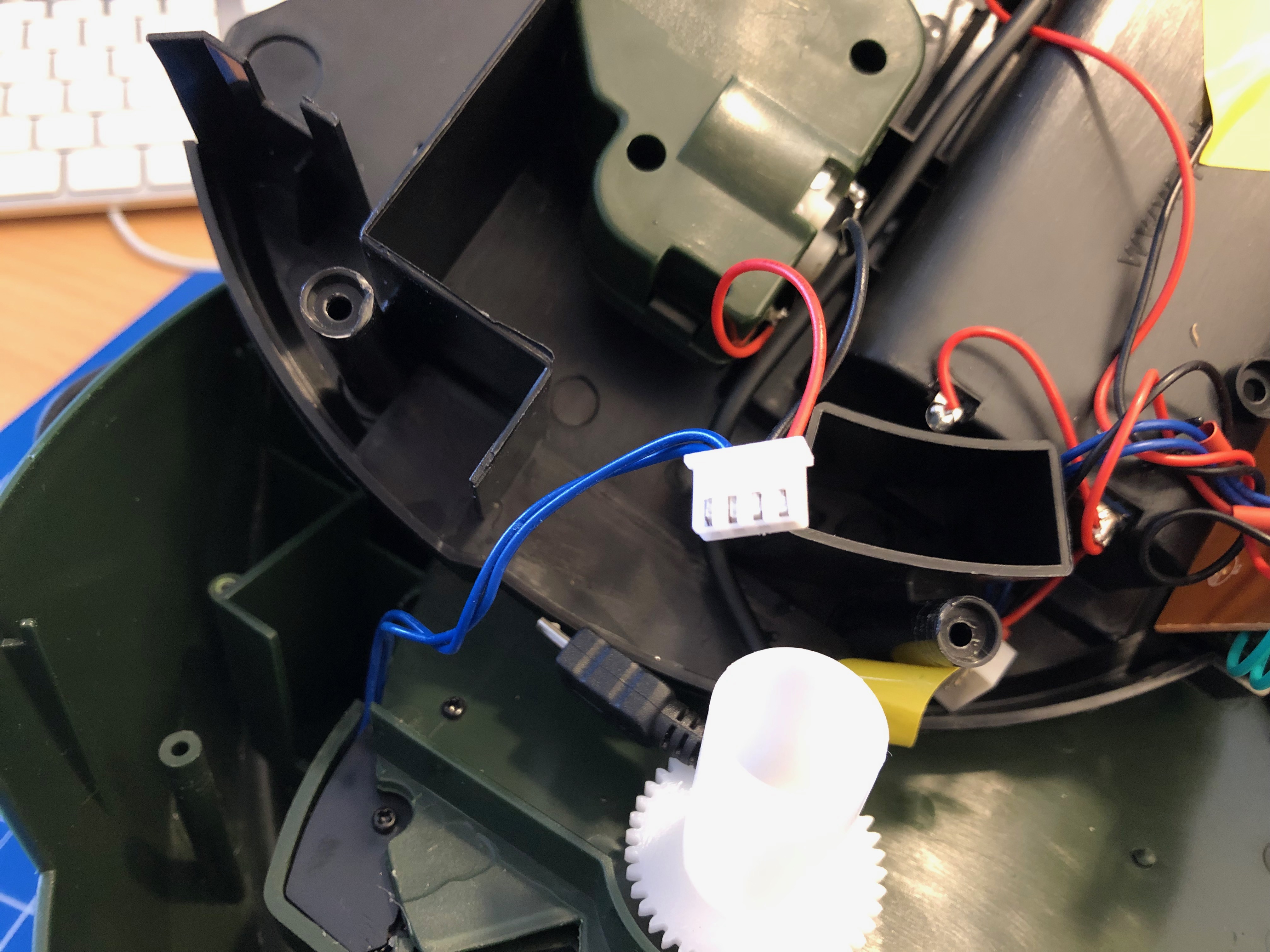
the wheel is turned by a DC motor and the switch is triggered by the wheels fins
I’ve added a connector to the switch and the motor cables for quick connect
The functional principle of the feeder is rather simple:
turn the feeder wheel
take the micro-switch status in account – when it’s pressed down the wheel must be pushing against it
turn it until the micro-switch is not pressed anymore
turn some more until it’s pressed again
Simple. Since the switch-status is not known on power loss / reboot a calibration run is necessary (even with the factory electronics) every time it boots up.
After opening the feeder I’ve cut the two cables going to the motor as well as the micro-switch cables. I’ve added a 4-Pin JST-XH connector to both ends. So I can reconnect it to original state if desired.
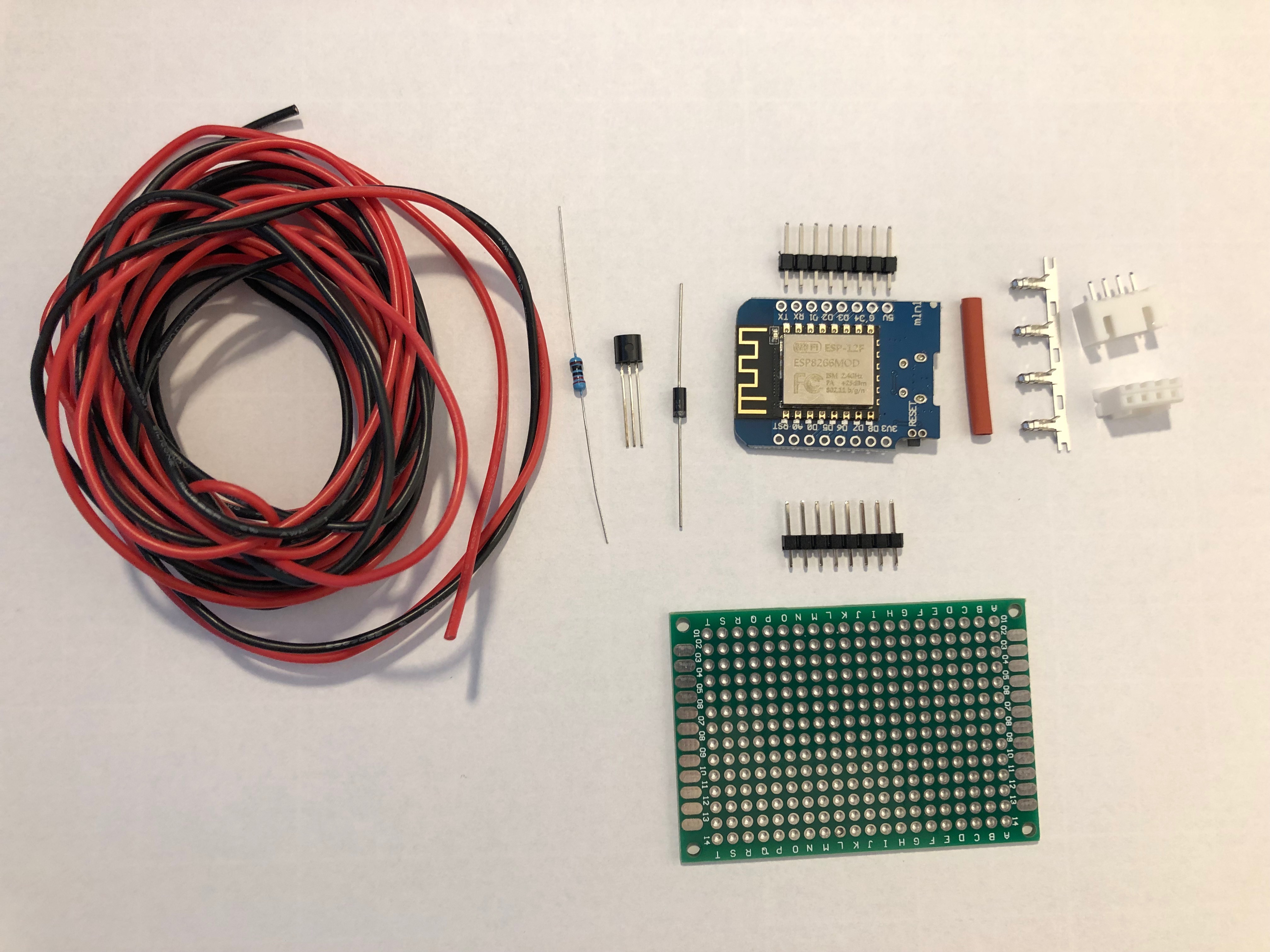
These are all the parts needed:
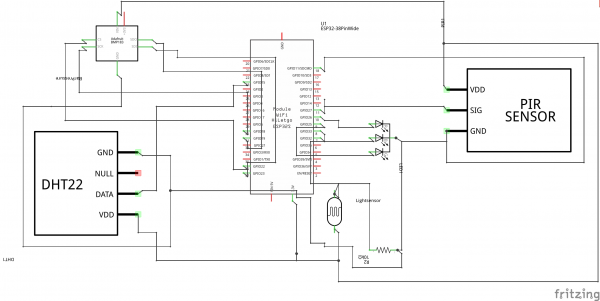
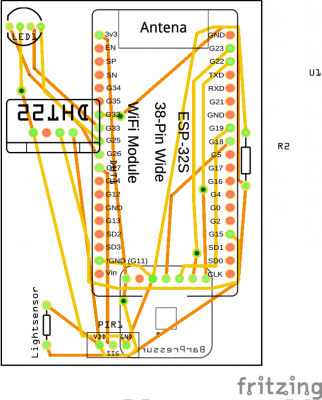
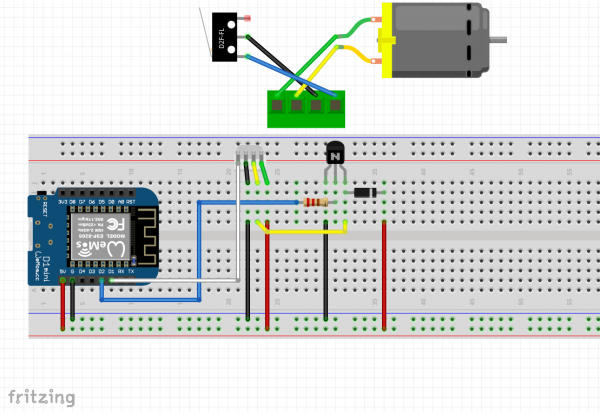
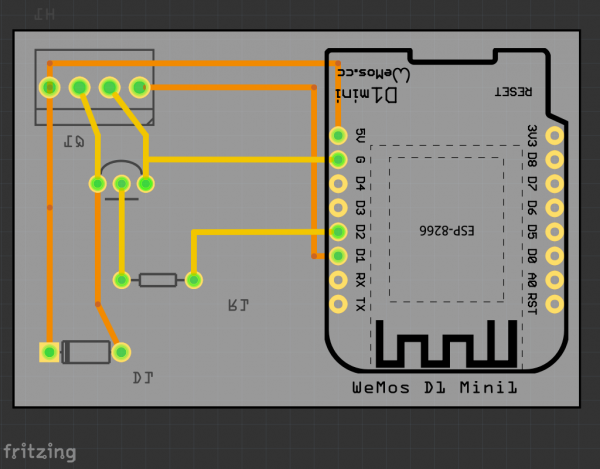
I am using a Wemos D1 Mini and a couple of additional components apart from the prototype board:
A PN2222 NPN transistor, a rectifier diode 1N4007 and a 220 Ohm resistor.
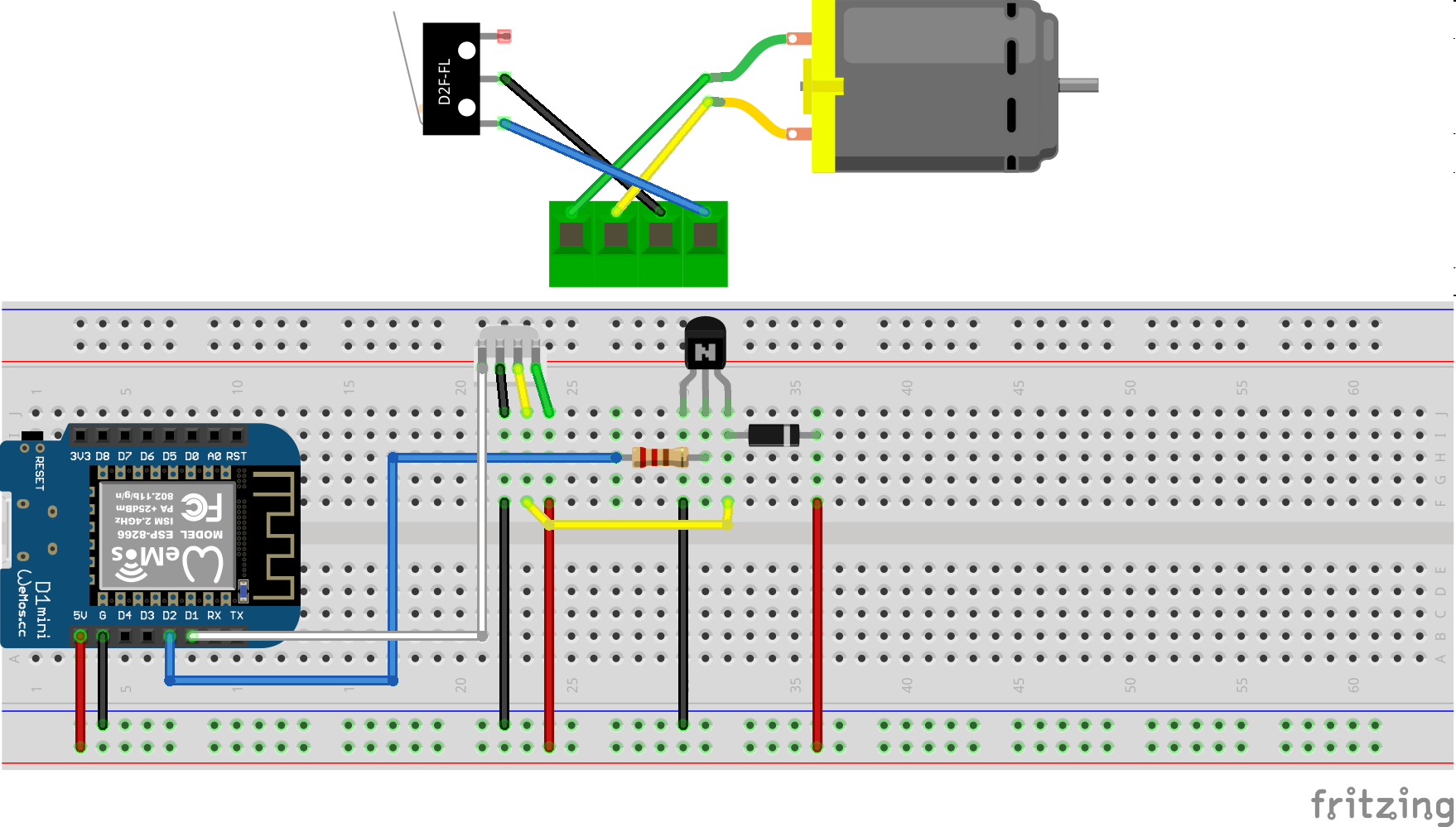
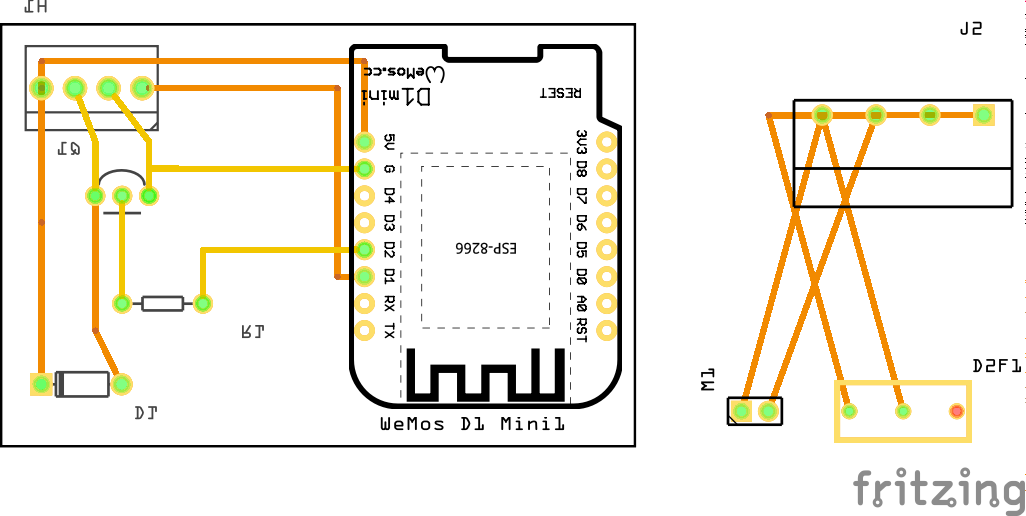
I’ve connected everything according to this schematic I’ve drawn with Fritzing:
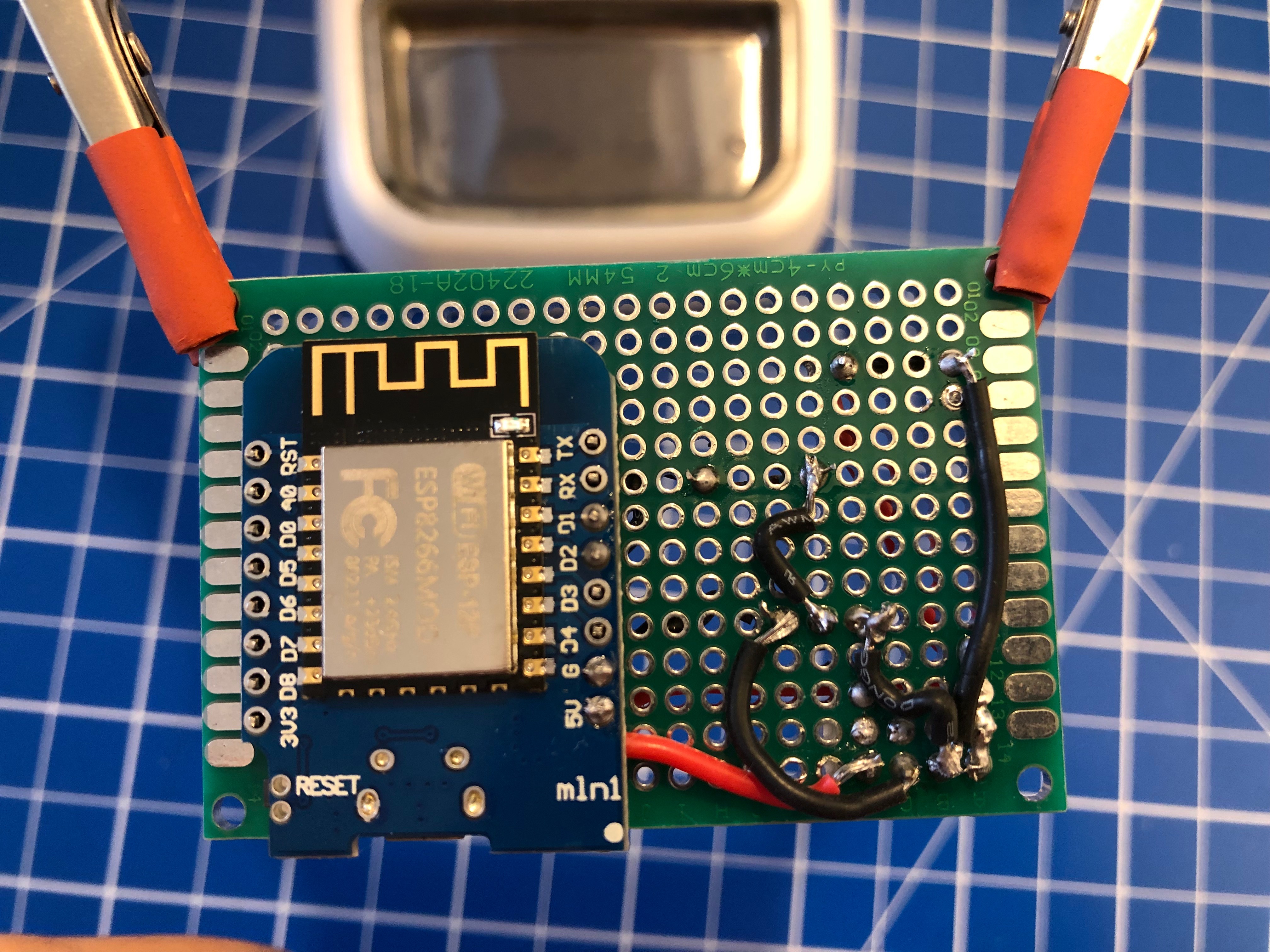
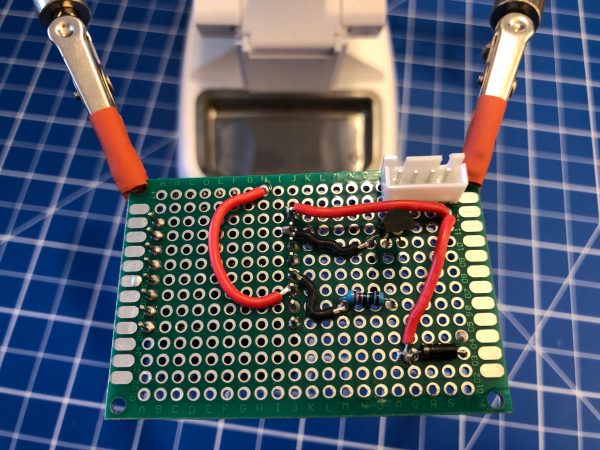
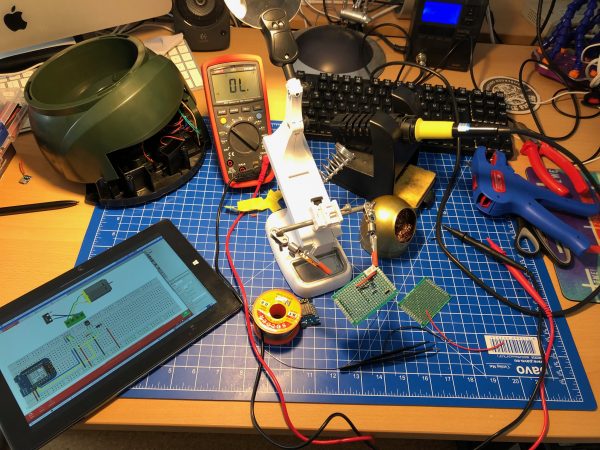
I’ve then prototyped away and put everything on the PCB. Of course with very limited solderig skill:
As you can see the JST-XH connector on Motor+Switch can now be connected easily to the PCB with all the parts.
Make sure you check polarity and that you did correctly hook up the motor and switch.
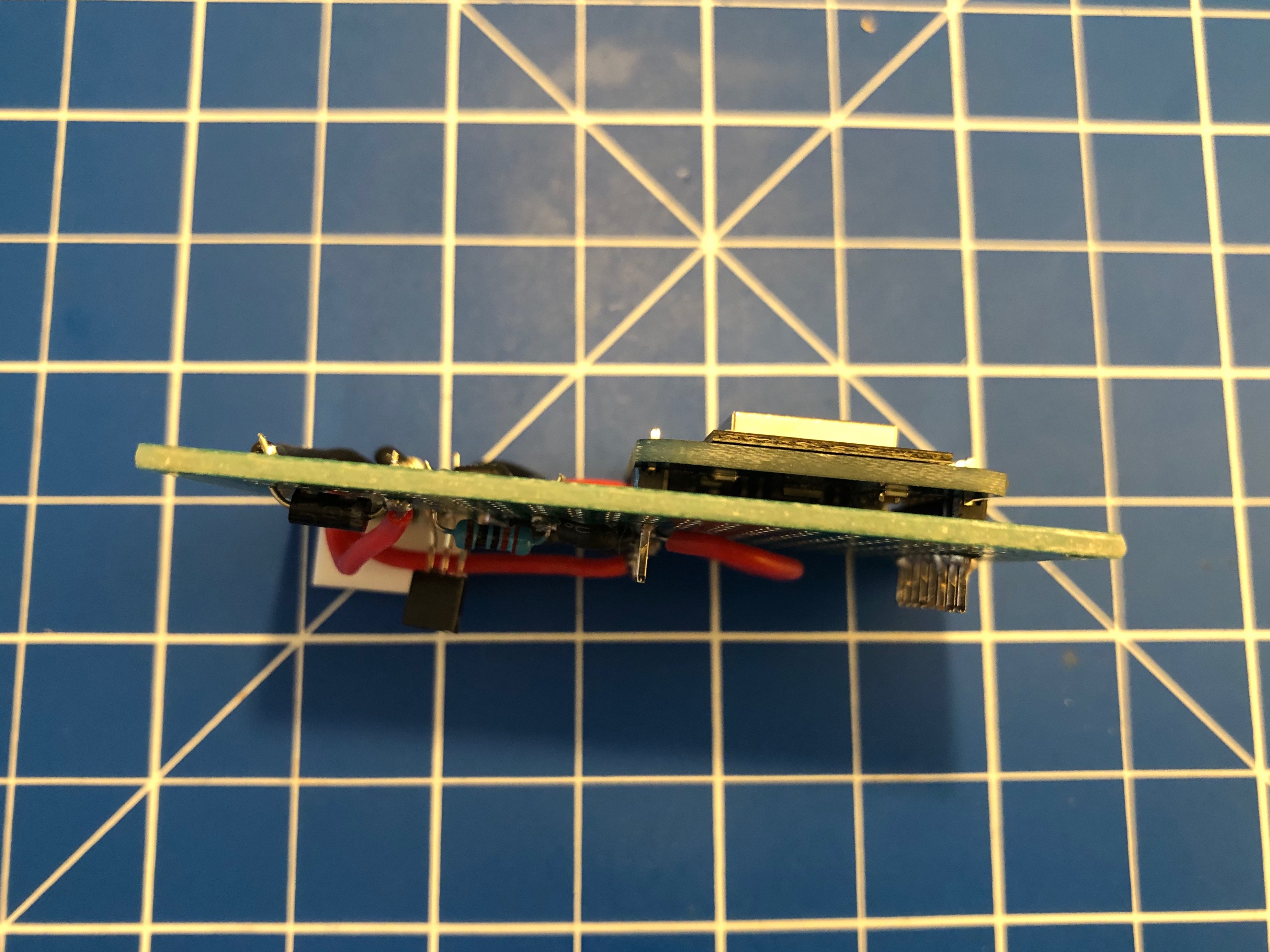
When done correctly the PCB (I’ve used 40mm x 60mm prototype pcb) and all cables will fit into the case. There’s plenty of room and I’ve put it to the side of it. I’ve also directly connected an USB cable to the USB port of the Wemos D1 Mini. As long as you put at least 1A into it it will all work.
Software
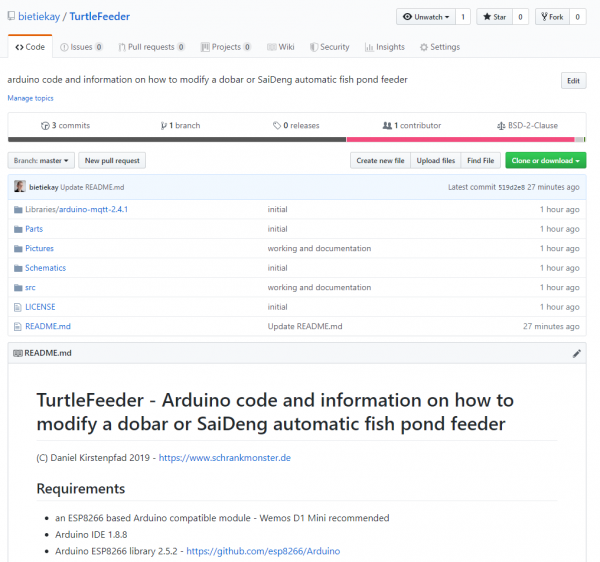
Since the Wemos D1 Mini sports an ESP8266 and is well supported by Arduino it was clear to me to use Arduino IDE for the software portion of this project.
To get everything running you need to modify the .ino file in the src folder like so:
Configuration
What you need to configure:
the output pins you have chosen – D1+D2 are pre-configured
WiFi SSID + PASS
MQTT Server (IP(+Username+PW))
MQTT Topic prefix
Commands that can be sent through mqtt to the /feed topic.
MQTT topics and control
There are overall two MQTT topics:
$prefix/feeder-$chipid/state This topic will hold the current state of the feeder. It will show a number starting from 0 up. When the feeder is ready it will be 0. When it’s currently feeding it will be 1 and up – counting down for every successfull turn done. There is an safety cut-off for the motor. If the motor is longer active than configured in the MaximumMotorRuntime variable it will shut-off by itself and set the state to -1.
$prefix/feeder-$chipid/feed This topic acts as the command topic to start / control the feeding process. If you want to start the process you would send the number of turns you want to happen. So 1 to 5 seems reasonable. The feeder will show the progress in the /state topic. You can update the amount any time to shorten / lengthen the process. On the very first feed request after initial power-up / reboot the feeder will do a calibration run. This is to make sure that all the wheels are in the right position to work flawlessly.
All in all there are 3 of these going to be running in our household and the feeding is going to be controlled either by Alexa voice commands or through Node-Red automation.